学习内容
对位基础讲解
- 手眼标定
- 坐标转换
- 对位计算
应用说明
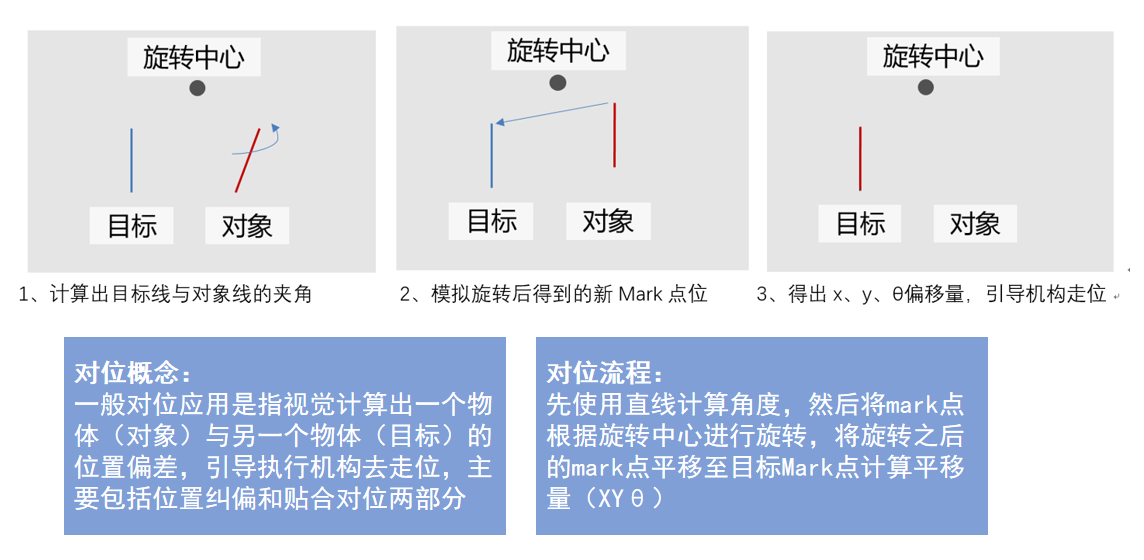
对位基础-对位概念
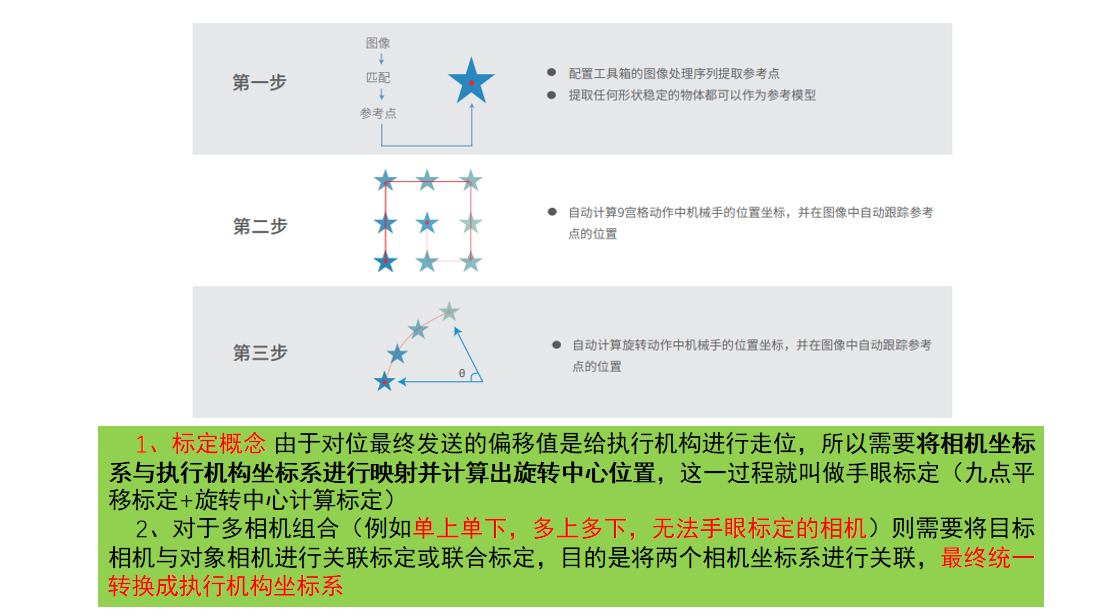
对位基础-手眼标定概念
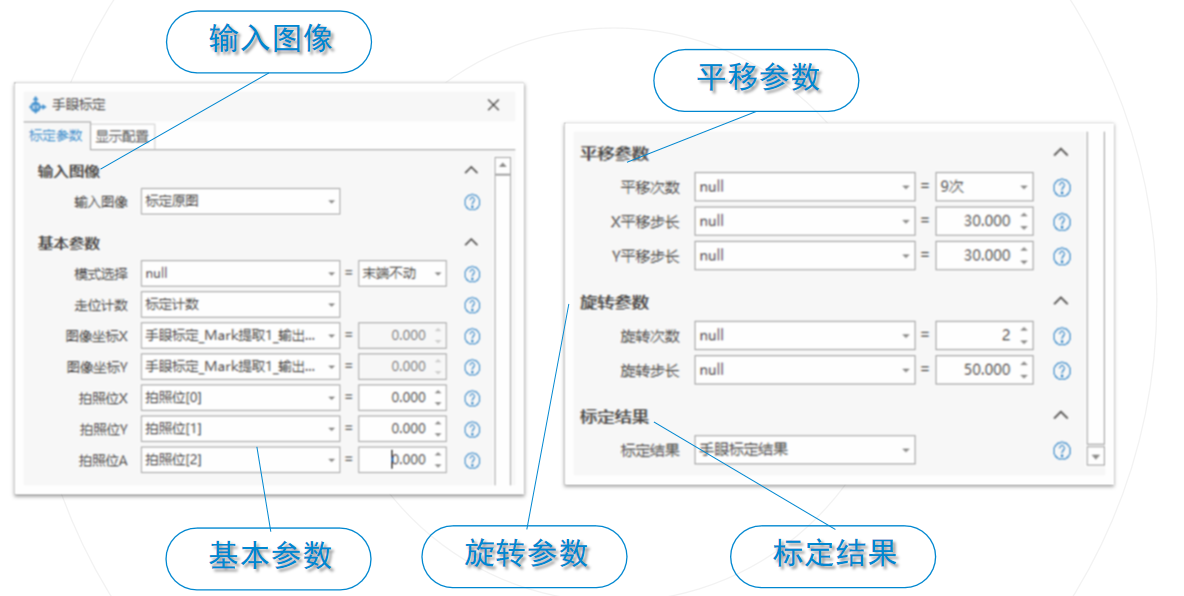
手眼标定——框架简介
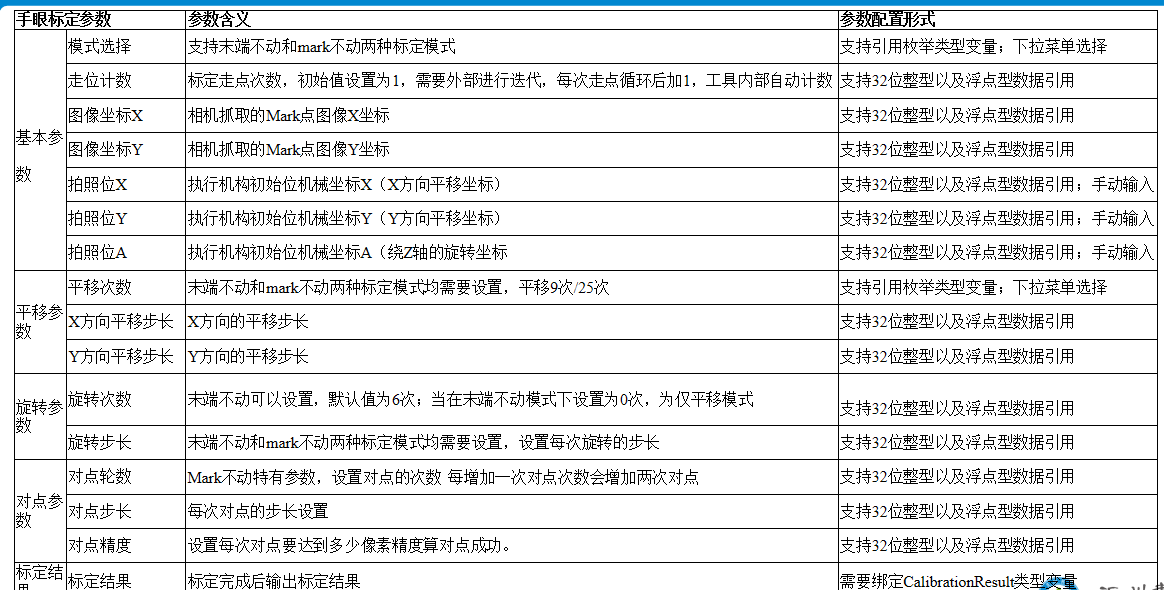
手眼标定——详细介绍
坐标转换——框架简介
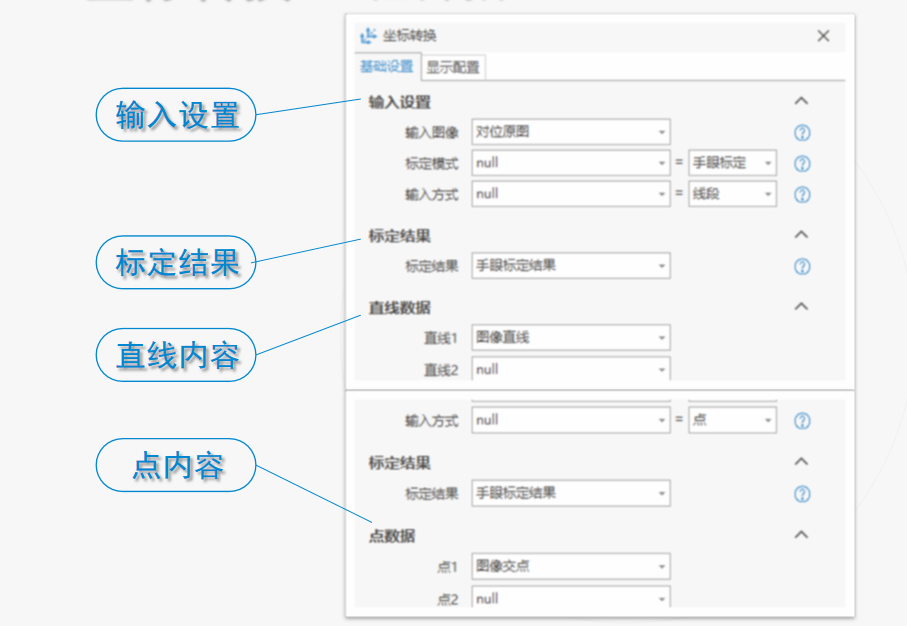
坐标转换——详细介绍
功能: 将图像坐标转换为其他坐标系下的坐标,通常配合手眼标定的输出结果(单应性矩阵)转换成机械坐标,联合标定的输出结果转换矩阵转换成标定板坐标。
| 坐标转换参数 | 参数含义 |
|---|---|
| 输入图像 | 将转换的点或者直线绘制到输入图像上,通过视觉窗口的输出图像可以查看绘制后的图像。 |
| 标定模式 | 目前支持手眼标定、J4轴标定、联合标定和关联标定四种模式。 |
| 标定结果 | 绑定上述四种模式标定的输出结果,CalibrationResult 类型。 |
| J4轴输入参数 | 当模式选择 J4轴标定时需要输入拍照位和机器人当前位置。 |
| 关联标定设置 | 关联标定设置,选择对位或者测量,对位则会生成机械坐标,测量生成图像坐标。 |
| 相机序号 | 选择需要转换的联合标定的相机序号。 |
| 点输入/直线输入 | 和输入方式有关,输入方式选择点则输入点,选择直线则输入直线。最多支持 8 组直线或者点。 |
对位计算——框架简介

对位计算——详细介绍
功能:在平面对位计算中,需要至少两个点可以计算出对位结果(对位偏移值)首先会根据直线角度或者线段坐标(取决于旋转计算方式)计算旋转角度(偏移角度θ),旋转后根据对象旋转后的平移点计算平移量(偏移值X,Y),节点的输出结果在结果输出中引用。
| 对位计算参数 | 参数含义 |
|---|---|
| 旋转计算方式 | 可以选择通过角度或者线段来计算,不同的计算方式,对下方的旋转角度输入会产生影响。 |
| 旋转中心X | 输入旋转中心X坐标。 |
| 旋转中心Y | 输入旋转中心Y坐标。 |
| 平移点输入 | 平移点输入方式,可以选择按点(Point)或者按坐标的方式(X,Y),不同的输入方式对下方的平移坐标输入产生影响。 |
| X,Y,角度补偿设置 | 在机构的X、Y和θ三个方向对计算出的偏移值进行补偿。 |
| 旋转坐标输入 | 输入内容和旋转计算方式相关联,如果选择角度,则输入对象和目标线段的角度;如果选择线段,则输入对象和目标线段起始和终止点的坐标。 |
| 平移坐标输入 | 输入内容和平移点输入方式相关联,如果输入点,则以Point的方式输入对象目标点对,如果选择坐标,则以X、Y方式输入对象目标点对。平移偏移量计算至少需要1个点,最多支持4个点,多个点计算方式为取点集中心。 |
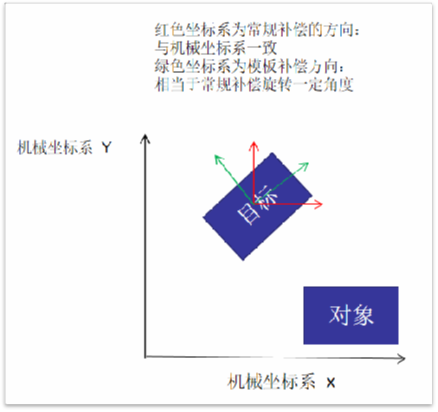
| 补偿模式 | 可以切换常规补偿和模板补偿,具体看右图说明。 |
课后练习
使用宝马标这套图片实现教学案例中的功能(使用循环工具实现手眼标定流程)
